
 购物车
购物车



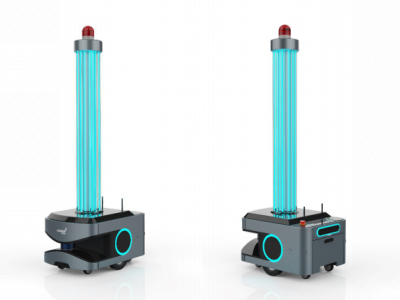 智能消毒防疫机器人
智能消毒防疫机器人
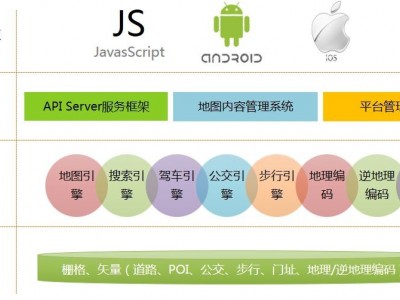 立得空间导航电子地图
立得空间导航电子地图
二、产品配置

三、系统参数

四、产品特点
1、适用各种复杂的室内外环境:包括封闭式地下空间、无GNSS信号,地面颠簸、坡度起伏等场景。
2、无需站点、无需初始化标定;
3、多种灵活采集模式,既可背负式,又推车式采集;
4、设备拆装简单便携,易于运输,可乘坐高铁;
5、采集效率高,每小时可采集12万平方米空间数据;
6、内置电池,循环充电,支持5小时以上作业。
7、软件全自动化数据采集及处理,自动匹配点云与影像数据;
8、可实时查看采集到的全景影像及点云数据
9、可实时查看剩余电量和剩余存储空间;
10、自动调节亮度、白平衡等影像参数;
11、成熟配套的软件平台,软件后续使用无任何收费。
12、提供平台二次开发接口,支持定制化开发;
五、应用场景
5.1电力巡检,电网资产管理
利用三维全景激光背包侠能够快速采集电网高精度激光点云,能够精确测量电站、建筑物、植被、交叉线缆等电网设施与电力线路的距离及间距,检测电网设计是否符合规范,间距是否满足安全要求。通过采集的高清全景影像能够让巡检人员对线路设施设备完成仪表仪表读数,异常情况的判别。
5.2林业资源管理、测绘
通过三维全景激光背包侠快速获取林业环境三维激光点云数据的新型测绘手段,能够完成林业资源调查与管理,林木类型与分布情况分析,单木测量及三维建模等应用,具有采集效率快,精度高的特点,且不会对林业环境造成损害。
5.3矿山测绘,土石方测量
对于矿区、工地等地形复杂环境,传统测绘及土石方测量方式具有作业难度大,部分区域难以抵达及效率低等问题,而通过三维全景激光背包采集能够充分发挥灵活采集、非接触式采集、作业效率高等优势,能够实现土石方测量、面状测量、数字化测量功能。
5.4 桥梁、古建筑三维建模、测绘
通过三维全景激光背包侠能够将桥梁、古楼等建筑物进行完整的高精度重建扫描,输出具有空间三维形态的点云模型,实现无接触式测量。可用于建筑物全方面测量、三维建模与仿真、BIM设计与运维管理、桥梁变形监测等等应用。
5.5公安刑侦,犯罪现场真实还原
三维全景激光背包侠能够完成犯罪现场全方位的真实还原及场景固定。刑侦人员通过背负式采集的方式采集现场数据,在避免案发现场的被破坏的前提下,对现场存留的血迹、凶器、脚印等数据进行采集备份。事后可在三维点云数据中对现场进行无限次的检查、测量,为犯罪破案及后期取证提供强力的刑侦手段。
5.6地下车库高精地图采集
在GNSS信号失锁的地下车库环境下,三维全景激光背包侠通过3D-SLAM技术不依赖GNSS信号也能实现自主导航定位,输出带有坐标系三维点云数据,完成地下车库的高精地图采集与制作,精度可达厘米级,解决自动驾驶最后一公里的定位难题。


