
 购物车
购物车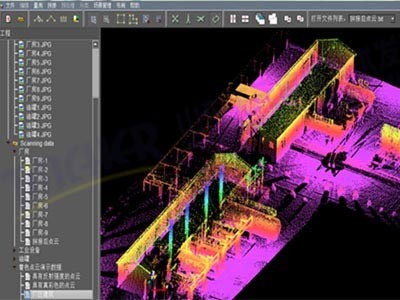


 天元-智慧农业综合管理平台
天元-智慧农业综合管理平台
 供水管网地理信息系统
供水管网地理信息系统
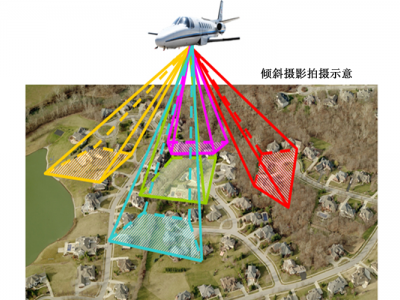 航拍数据处理
航拍数据处理
三维激光扫描仪一般能同时获取两种数字产品——全息影像和激光点云数据。三维激光点云是物体表面的高精度三维坐标,通过点云直接可以获取地物坐标及特征信息。全息影像数据具有形象的纹理和颜色信息,可以作为三维激光点云数据的纹理补充。
将点云与全息影像数据进行配准,融合两者信息,通过三维激光点云可以找到对应影像像素,进行点云着色;反之以全息影像作为展现载体,通过影像素坐标可以找到对应三维激光点云,使两种数据产品拥有统一的坐标系统,相互空间关联,称之为影像点云数据。
基于影像点云数据,开创以全息影像为前台表现,以点云为后台支撑,将全息影像与点云严密配准融合,实现纹理提取、建模和建库一体化的三维快速建模技术。
基于影像点云的快速建模内业流程:
1、通过三维激光扫描仪获取原始点云和全息影像数据,将输出的点云和全息影像数据,以工程化的方式管理;
2、原始点云预处理:对原始点云进行拼接、去噪、分类、滤波处理等,输出预处理后的点云数据;
3、点云与全景配准:将三维点云和全息影像关联并自动配准映射,输出影像点云数据;
4、基于影像点云的三维建模:
①在三维点云俯视图上,利用点云切面,快速勾画建筑物水平截面的轮廓线,自动利用点云计算建筑物高度将轮廓进行拉伸,构建建筑物模型;
②全景纹理贴图:对于构建好的建筑物模型,支持通过与全息影像融合进行纹理提取,在三维模型中显示与其对应的贴图纹理;
③其他三维地物采集:道路面、立杆行道树批量三维建模处理。


